As Raspberry Pi does not have analog sensor inputs you have to connect your wheel angle sensor through external ADC. Tractor Pilot supports two popular ADC modules with I2C interface:
1. ADS1115 (16-bit resolution)
2. PCF8591 (8-bit resolution)

Connection Diagram
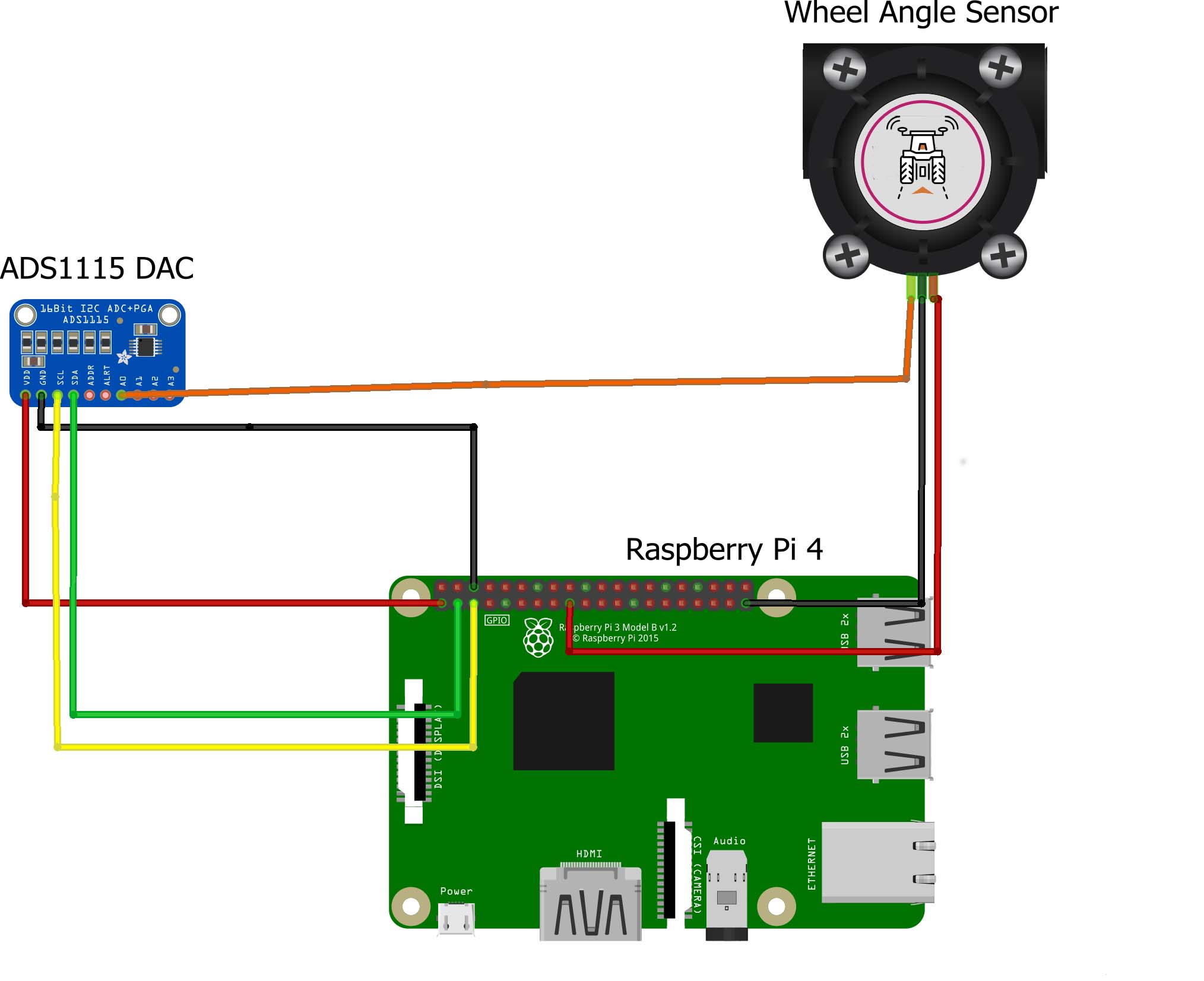
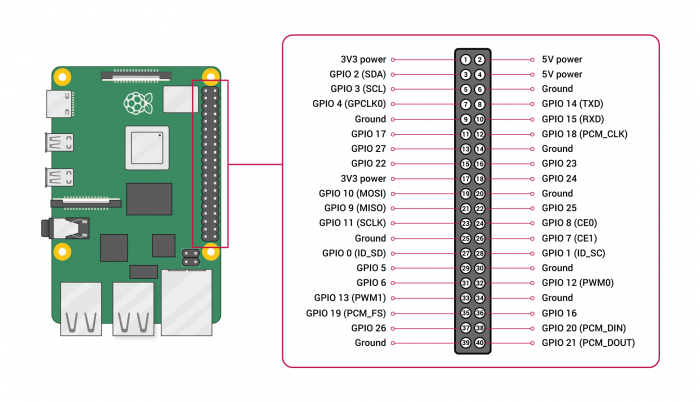
ADC SDA - RPi SDA (pin3)
ADC SCL - RPi SCL (pin5)
ADC Vcc - RPi 3.3V (pin1)
ADC GND - RPi GND (pin6)
Angle sensor SIG line - ADC Analog Input 0 (A0)
Angle sensor Vcc - RPi 3.3V (pin 17)
Angle sensor GND - RPi GND (Pin39)
Wheel angle sensor settings
Click Tractor icon, select "Steering settings" option, click "Wheel angle sensor settings" button

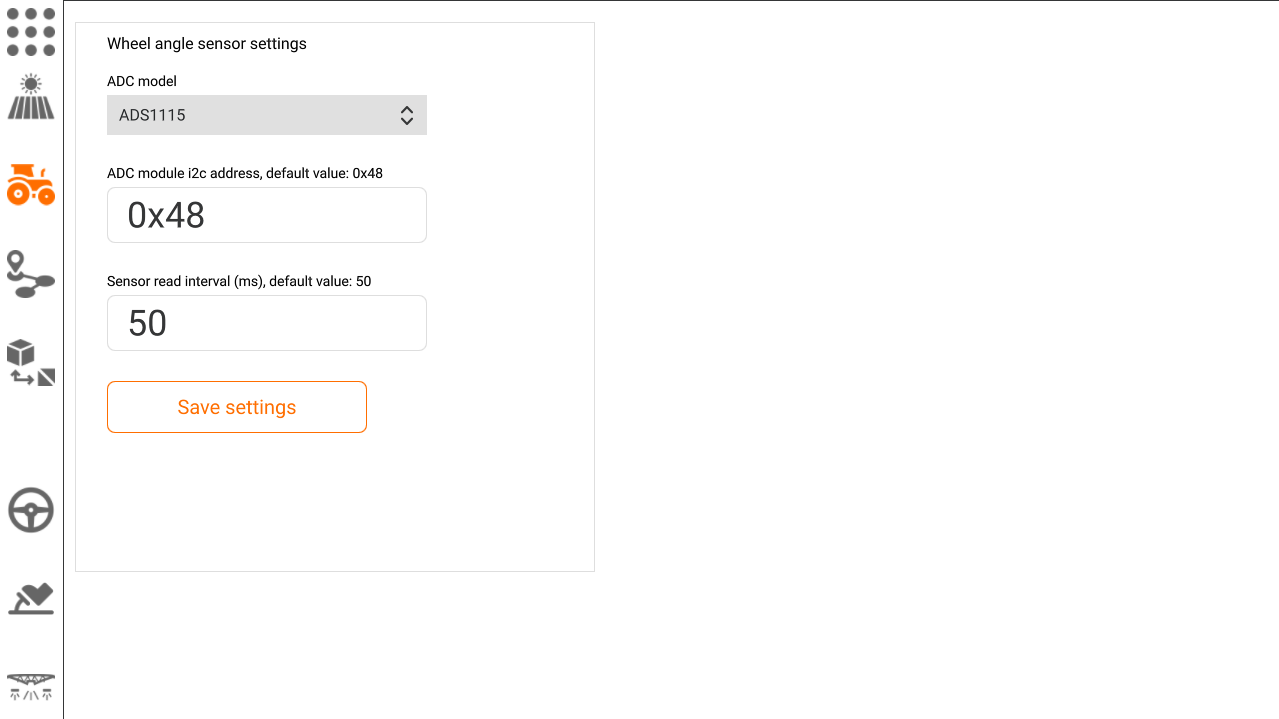
Select your ADC module model, input its address on i2c interface (the default address is usually 0x48), input sensor polling interval (recommended value - 50 ms)
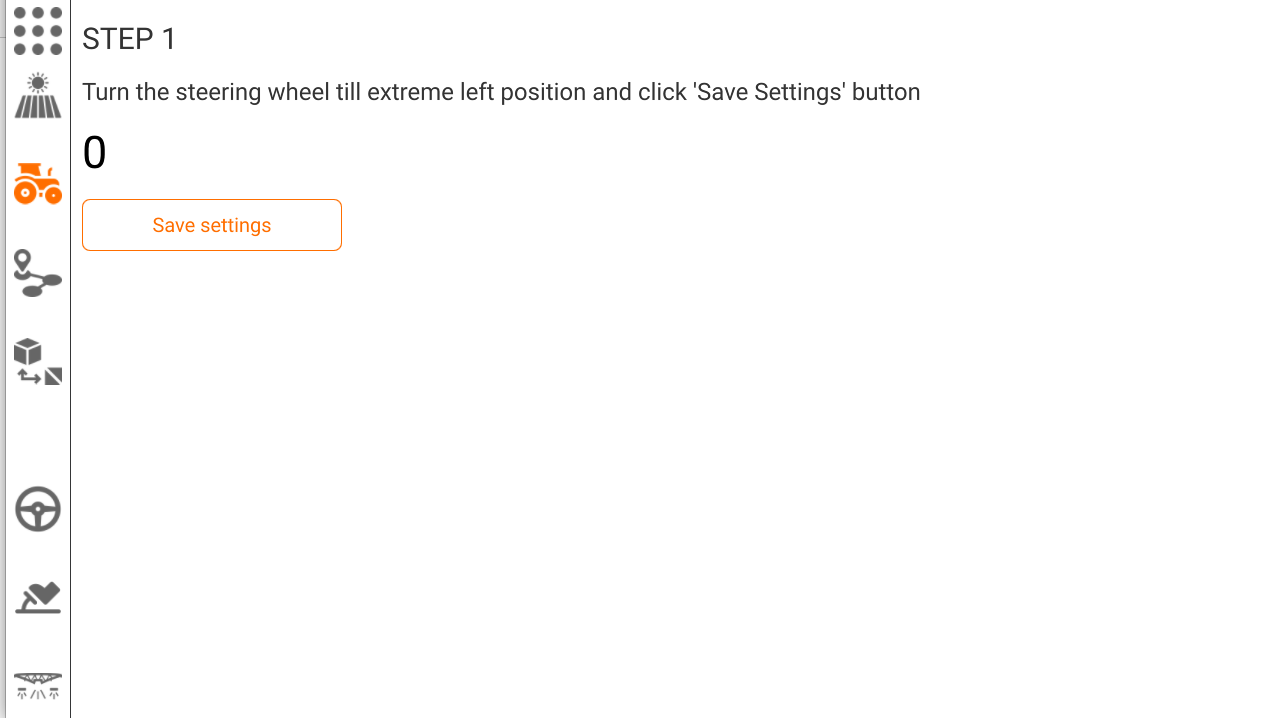
Wheel angle sensor calibration
Before you start using TP you should calibrate your WAS. Click "Wheel angle sensor calibration button" and follow the calibration instructions.