There are 2 navigation configurations supported by Tractor Pilot autosteer software - Single GPS and Dual GPS. In Single GPS configuration IMU sensor is used to determine the heading and roll angles.
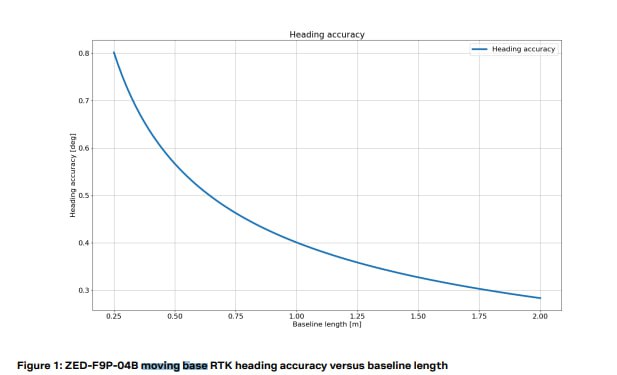
To determine the heading and roll angles in Dual GPS configuration TP is using a pair of GPS receivers (we will call one GPS receiver a Moving Base, and another - a Rover) mounted on the same axis orthogonal to the vehicle's axis of symmetry with equal distance from the ground level to the antennas. Baseline is the distance between antennas, the minimum baseline length shoud be 1m long. However the longer baseline gives the better heading angle accuracy, so recommended baseline length is about 2m.

Recommended GNSS module for Tractor Pilot is ublox F9P with USB port as TP fully supports ublox UBX protocol and has a built-in tool for F9P modules configuration (uBlox u-center software is not needed). However you can connect any GNSS module with built-in RTK support as TP also supports NMEA messages handling. GNSS modules without USB port are also supported as TP provides 3 UART interfaces for connecting such modules.
Raspberry Pi Connection and settings
Connect your GPS module(s) either to Raspberry Pi USB port (recommended way) or to one of the following UART ports (ttyAMA0[TX - GPIO 14, RX - GPIO 15], ttyAMA1[TX - GPIO 0, RX - GPIO 1], ttyAMA2[TX - GPIO 4, RX - GPIO 5])
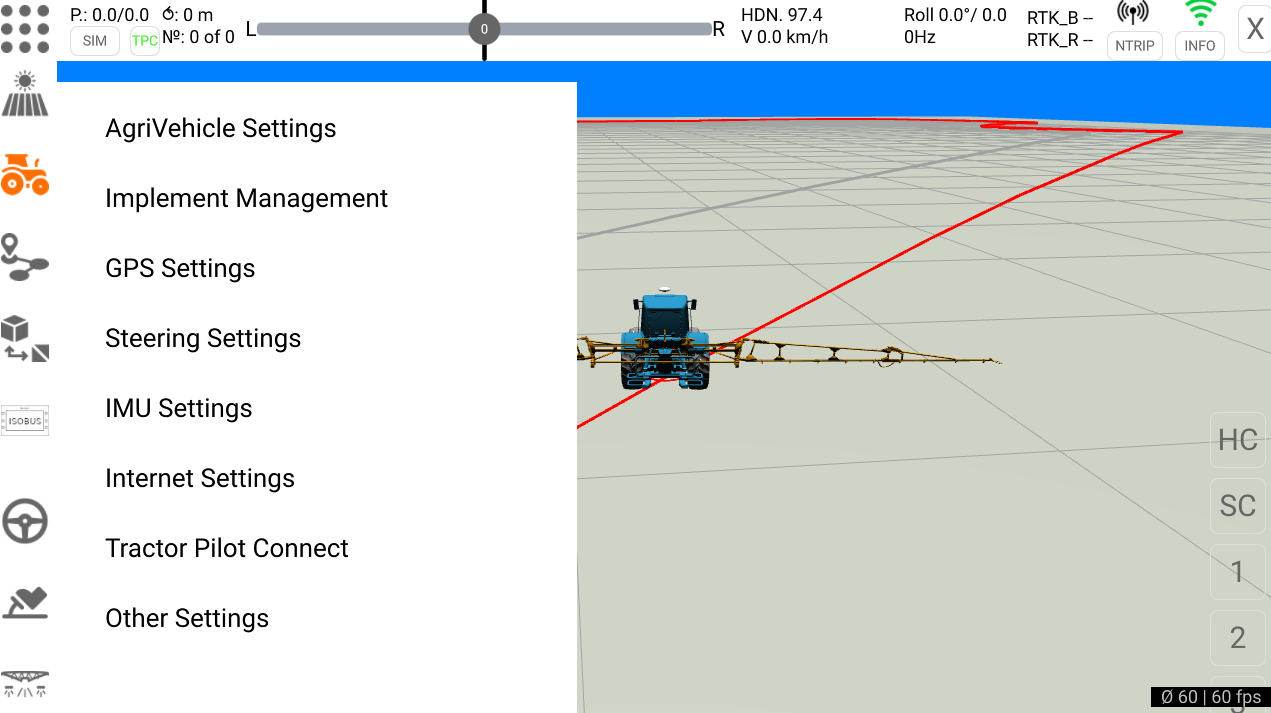
Click Tractor icon at the left sidebar and select GPS Settings option.
Single GPS Configuration

Select "Single GPS" option as Configuration type. Click "Switch to Configuration mode" and after Operation Mode will change it status click "Advanced Settings" button.
Dual GPS Configuration
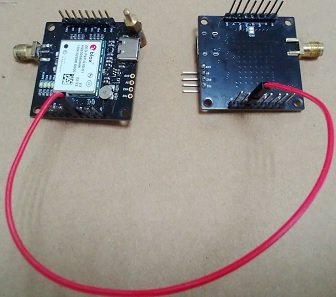
1. Connect TX2 pin of the Moving Base GPS receiver with the RX2 pin of the Rover GPS receiver with a wire (if you use TP in Dual GPS configuration)
2. Connect GPS antennas. The Moving Base antenna should be mounted at the left side of a rod, Rover antenna - at the right side.
5. If everything is fine ttyACM0 and ttyACM1 devices representing gps receivers will appear in the available port options list. The bitrate should be the same for both devices - 460800 is a good value. If rover and moving base ports are mixed up you will get a notification after reboot with a button to fix it.
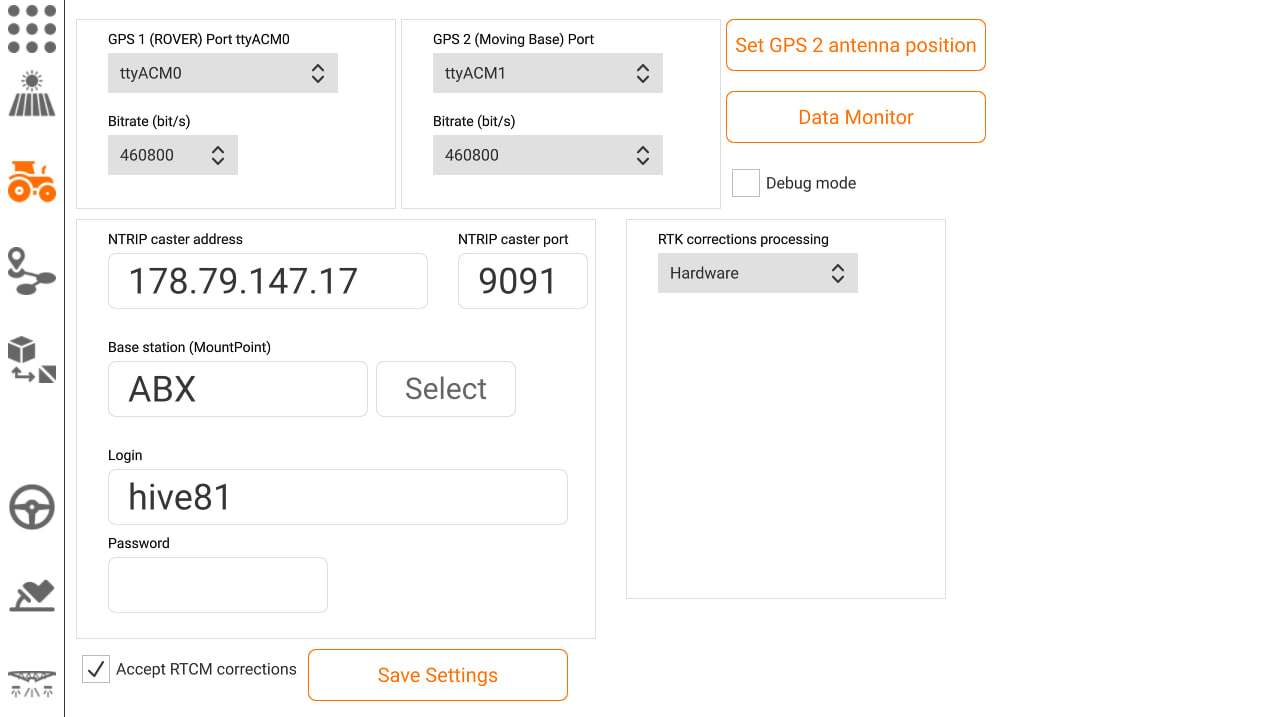
6. Input credentials to access NTRIP caster and Base Station providing RTCM3 correction messages and check "Accept RTCM corrections" checkbox. This step is mandatory - without these corrections it is impossible to obtain high precision positioning so TP will not operate correctly.
7. Click "Save Settings" button.
8. Click "Set GPS 2 antenna position" button
Setting Moving Base GPS antenna positition
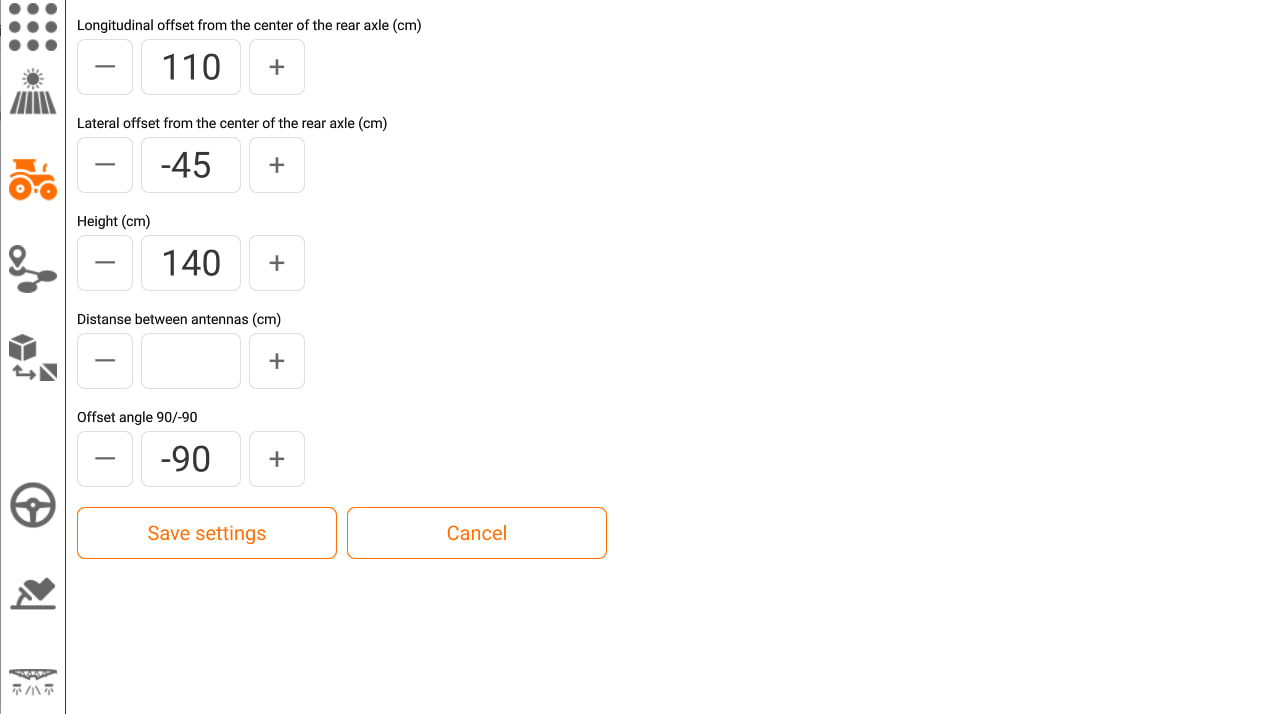
TP follow path algorithms need to know the position of the vehicle's rear axle center point. The position calculated by the Moving Base GPS receiver is in fact the position of it's antenna. So to get the position of the rear axle center point the position of antenna with respect to the rear axle center point should be set. Input antenna offsets from this point - longitudinal offset (positive direction is forward), lateral offset (negative direction is left), height from the ground level. Distance between antennas is an optional parameter - it is used only for accuracy validation.
If the rod with antennas is absolutely orthogonal to the vehicle's axis of symmetry and moving base antenna is at the left side set -90 value for offset angle. Click "Save settings" button and reboot
Reboot
To reboot click the Cross button in the top right corner and select "Reboot" option from the popup menu
GPS module firmware update
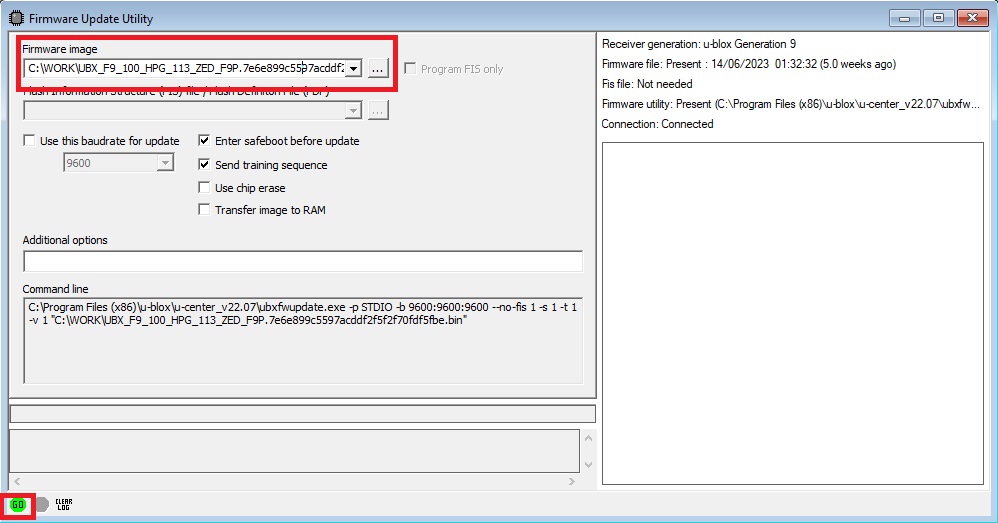
Download U-Center- GNSS evaluation software for Windows from uBlox. U-Center is used for F9P module firmware update.
Download v.1.13 firmware for u-blox F9P
To update/downgrade the firmware to v.1.13 select Tools - Firmware Update option from the U-Center top menu. Select firmware file and click "Go" button