To build Raspberry Pi DIY autosteer system you'll need the following modules:
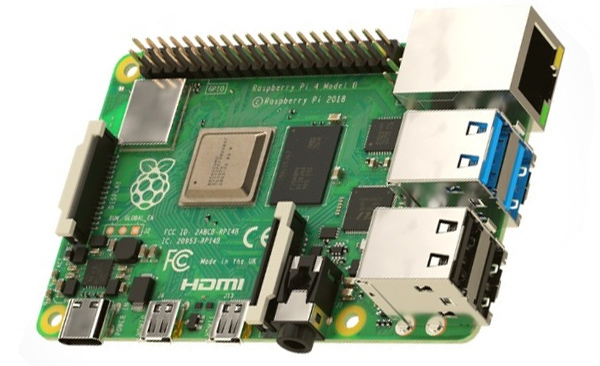
1. Raspberry Pi 4 computer 2-4 Gb RAM with 8-32Gb class 10 microSD memory card
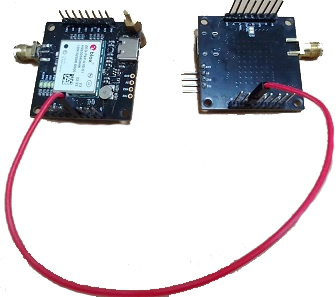
2. uBlox F9P GPS receiver or a pair (for heading and roll angles determination if you do not use the IMU sensor) of uBlox GPS F9P receivers
3. Multifrequency GPS antennas

4. IMU sensor (required for single gps configuration)
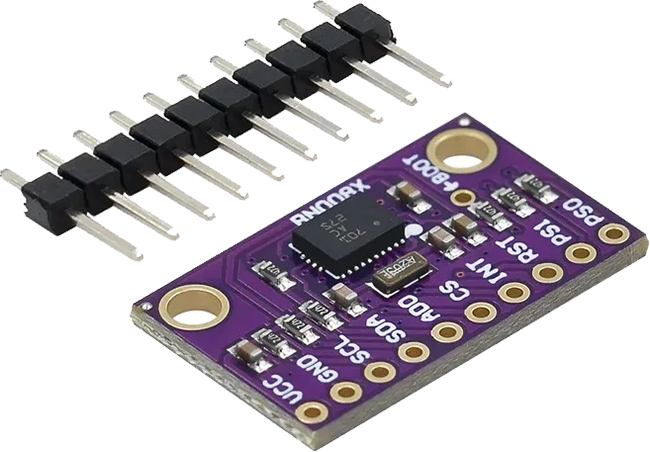
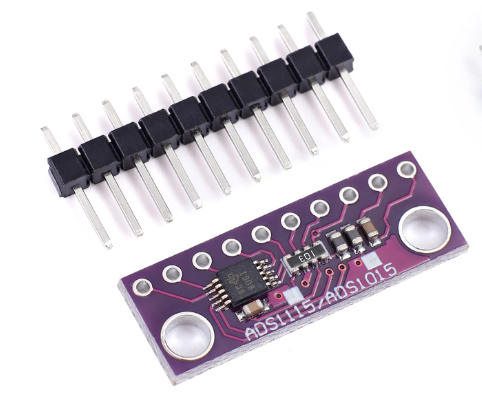
5. ADC module
6. Wheel angle sensor

7. External motor for steering wheel
Two types of motors can be used for steering:
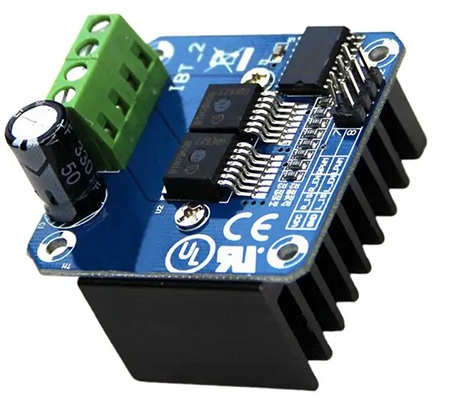
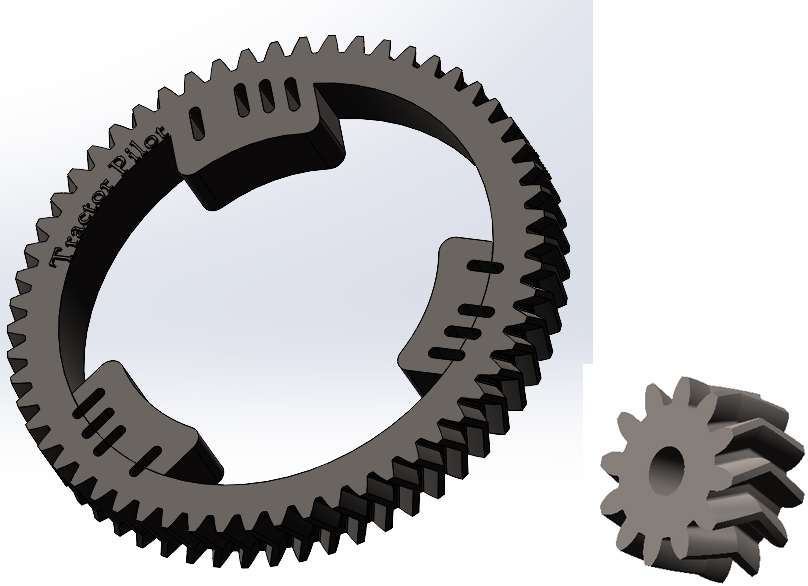
1. Cheap DC motor with a pair of gears (one is mounted on DC motor shaft, the other is attached to the steering wheel) and a motor driver

2. Expensive BLDC motor with a hole for steering shaft.

8. MCP2515 CAN bus adapter (optional)

9. LoRa module (optional)

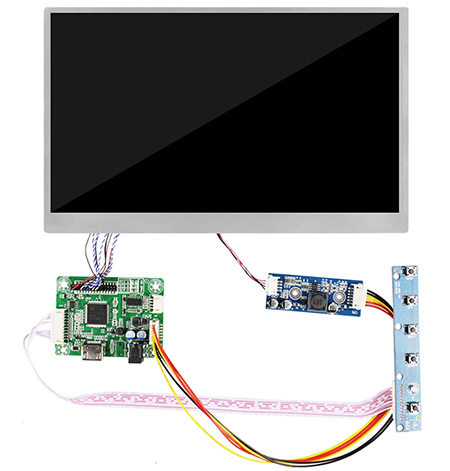
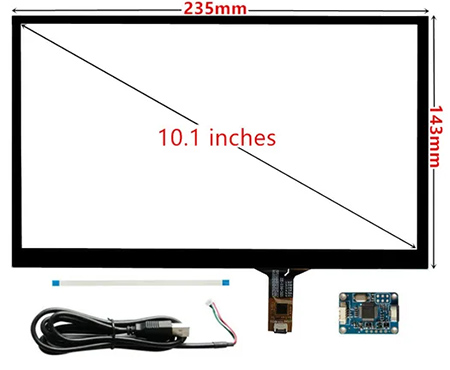
10. 10 inch LVDS panel with USB sensor glass
The minimum screen resolution should be 1280x720