@Bodzio what information do you need?
Mike
@Mike
Posts
-
Rovers connection. Troubleshooting -
New RTK stations connection. Troubleshooting -
v.055 Released!New features in v.055
-
Swath Editor
Automatically built swathes do not always have the best headland turn position, especially on irregular-shaped fields. Now you can move the headland turn position in special editor. Press "T" button at the right side of main screen to open the editor

Select the swath you want to move in the respectful combobox, fill-in the offset value(negative values will reduce the swath length, positive values will increase the length) and click "Correct button" -
Routes are saved automatically. After you start the app the last generated route will load
-
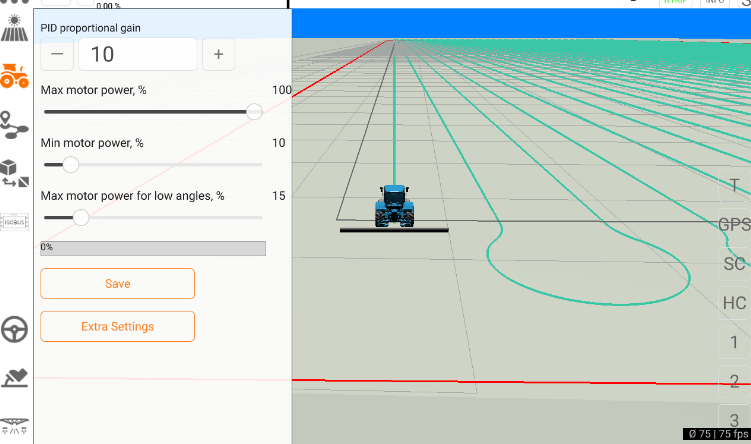
Test Loop Route
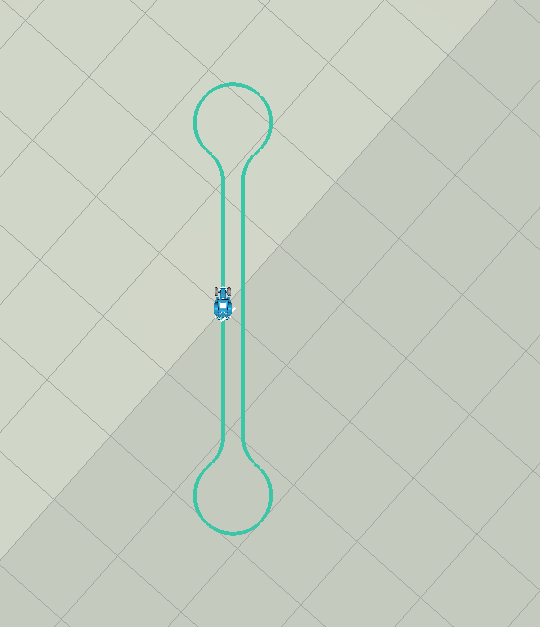
Test Loop Route is introduced for testing and tuning autosteer settings. Click Tractor icon at the left sidebar, then Steering Settings, then Test Loop button to load TLR. The width of Test Route is selected automatically according to the working width of the active implement, the length of Test Route can be adjusted in "Other Settings" section of the app -
Routes generation performance significantly enhanced
-
Top Field View looks better now

-
Tuning settings don't overlap the main screen anymore.
-
-
Holeshaft BLDC steering motors -
Wheel angle sensors -
ISOBUS CAN adapters -
Holeshaft BLDC steering motors -
Feature requests -
Assembly questions -
DC steering motors and drivers -
Feature requests -
Feature requests -
Rovers connection. Troubleshooting -
Where to buy hardware modulesRaspberry Pi 4 (2-4Gb RAM)
Raspberry Pi 4 2Gb ~60$
OR
Raspberry Pi 4 2Gb ~40$GPS modules
UBlox F9P module with USB port ~150$
GPS antennas
Helix multifrequency antenna for RTK GPS ~50$
OR
Round multifrequency antenna for RTK GPS ~50$IMU sensors
BNO 085 IMU sensor ~20$
Analog-digital convertors (ADC)
ADS1115 ~2$
Steering Motors
DC motor 350rpm ~73$
OR
Keya BLDC with CAN-bus controlMotor drivers for DC motor
IBT-2 ~2$
OR
Cytron MD13S ~20$Wheel angle sensors
AA-ROT-120 ~20$
CAN bus adapters (for ISOBUS connection)
Screens
10.1 with integrated touch ~113$
OR
Bright LCD -
Where to buy hardware modulesHere is the full list of modules required for building Raspberry Pi based guidance and autosteer system.
In this topic you can share the links where to buy them -
Feature requests -
New RTK stations connection. Troubleshooting

